VCM Collaborative Package

Application: Direct mount cobot screwdriver end effector for advanced assembly adds auto-feed screwdriving to your collaborative workspace.
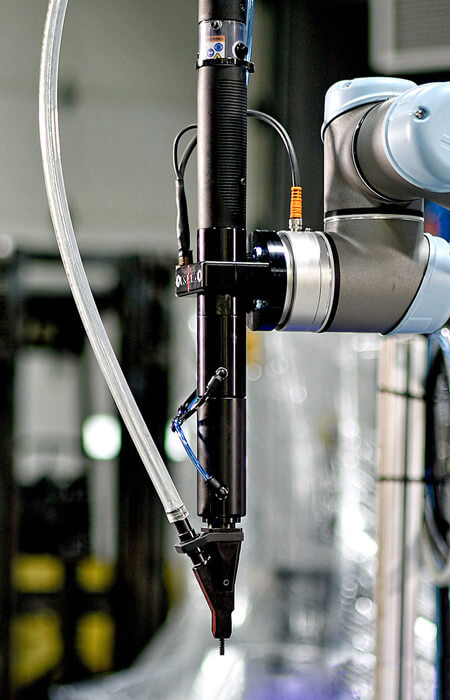
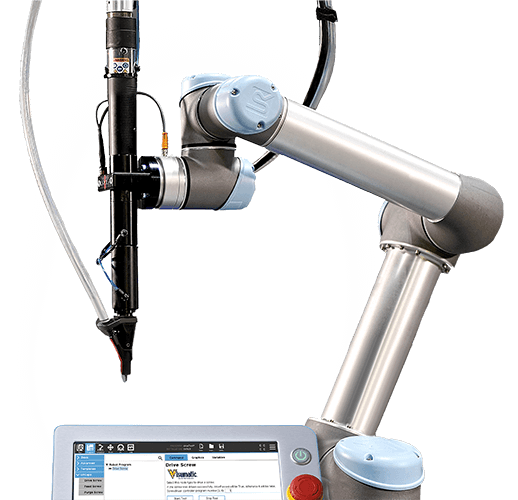
The VCM-3X.2 collaborative robot fastening system is a complete feed and drive package for use by machine builders. It includes an automatic feeder, programmable drive system, skeleton robot program, and end effector for direct mounting to a collaborative robot wrist. The lightning-fast screw feed to tip system saves precious cycle time keeping the cobot productive.
Compact End Effector:
- easy teach robot positioning for faster set up
- close center of mass minimizes cantilever effect
- clears part surface obstacles with less motion
- mitigates inertia effect on robot sensors
- direct faceplate mount for simple install
The light weight end of arm tooling (EOAT) allows maximum robot movement speed without sacrificing collaborative safeguards, having an average payload mass of 2.25 kg. Most applications will not require traditional safety hardware like light curtains or mechanical guarding making payback time faster.
The Visumatic Advant-edge
The cobot screwdriver module comes complete with Visumatic’s field-proven power bit advance, bit position sensors, and a fastener delivery confirmation sensor ensuring a repeatable joining operation.
Built-In Signaling Includes:
- OK to move robot
- Remote Screw Feed
- Torque Good/Bad
- Cycle Start
- Fastener Delivered

The Visumatic cobot system has pre-programmed fault recovery logic to automatically continue screwdriving after a force safety stop. This occurs without operator intervention, maintaining process efficiency.
Cobot Screwdriver packages are designed for your fastener and part, with the best choice of:
- Nosepiece: Jaw, Fin-Jaw, Miniature
- Visumatic Automatic Feeder System
- Feeder Escapement: Standard Screw, Nut, Cam, or Finger
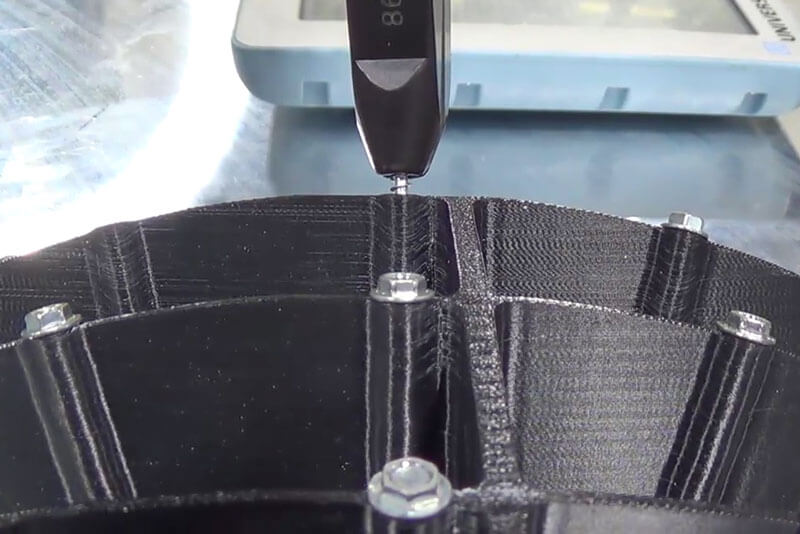
CASE STUDY
Automation Group Nails Proof of Concept with Cobot Screwdriver Assist
An appliance manufacturer purchased a handheld automatic screwdriver to speed up production on a fan assembly. Their in-house machine build group began exploring the idea of taking automation to the next level using collaborative robots for this application, as well as the next targeted high-volume product.
More VCM Collaborative Package Photos